WOSP traverse |
  
|
WOSP traverse |
|
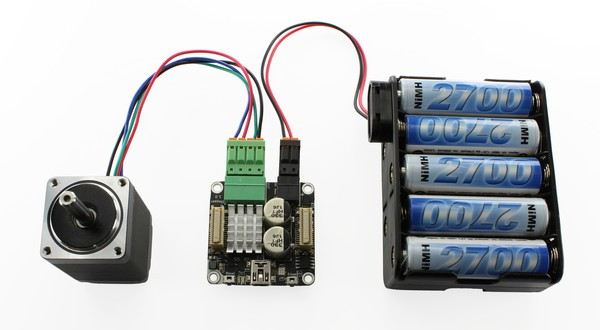
These objects (managed in the list of spectrometers) control the motion of a stepper motor that moves a payload on a linear traverse. The stepper motor must be controlled by a Tinkerforge stepper brick which is shown below:
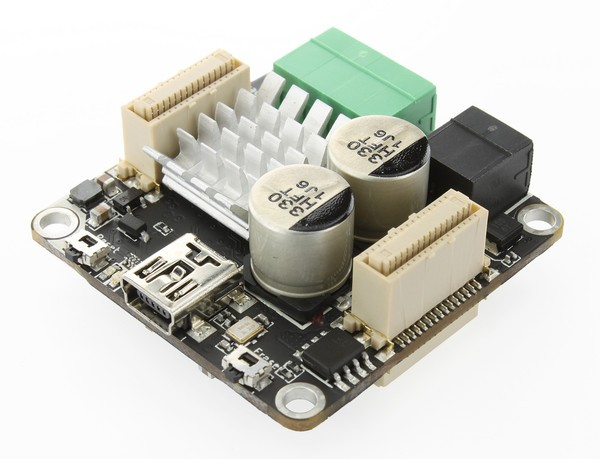
The brick has an external power supply, connectors for the stepper motor and a micro USB connector.
Note that there is a maximum external voltage of 38 V and some other limitations on the stepper motors that may be operated with this board. If you need stronger motors you can use a Trinamic traverse object which provides the same function but for stronger motors.
Once you have tested the function of the stepper motor with the Tinkerforge brickv tool you can enter the obtained parameters in the SCOUT dialog for this type of object:

Besides setting speed and acceleration you can define 'Steps for upward movement' and 'Steps for downward movement'. These parameters define how many steps the motor will do when you press the buttons 'Move down' and 'Move up', respectively. You can use these commands to position your payload at 3 different locations, called 'Home', 'Dark position' and 'Reference position'. What we have in mind here is to move a reflectance probehead to a position where you can record the dark signal, to a reference mirror and then to a position where the probehead sees the sample (=home position). Once the payload is at the wanted position you can press the 'Set home', 'Set dark' and 'Set ref.' buttons to record this position. The parameter 'mm per step' can be set in order to convert the position of the payload given in steps to mm. If you are done setting the parameters you have to press OK to close the dialog and save the parameters.
When you open the dialog once more you should verify that the payload moves to the correct positions when you press the buttons 'Go home', 'Go to dark pos.' and 'Go to reference pos.'.
Objects of type 'WOSP traverse' listen to the following script commands:
•object command, my_traverse, move to home position
•object command, my_traverse, move to dark position
•object command, my_traverse, move to reference position
•object command, my_traverse, move to position xyz //here xyz stands for an integer number defining the wanted position
•object command, my_traverse, move to mm xyz //here xyz stands for an integer number defining the wanted position in mm
•object command, my_traverse, move up // moves up by the pre-defined number of steps for upward movements
•object command, my_traverse, move down // moves down by the pre-defined number of steps for downward movements
You can use the following optical functions to extract information from WOSP traverse objects:
•my_traverse (position) //returns current position in steps
•my_traverse (position_mm) //returns current position in mm
Warning:
Please note that WOSP traverse objects do not provide a mechanism to find a correct and well-defined starting position when the system is turned on. You have to make sure that the payload is a position 0 when the system is turned on. If you need a safe and automatic behavior at system start-up you can ask us to add this functionality.